近日,中山大学电子与信息工程学院(微电子学院)教授王凯团队与合作者,首次提出了一种基于神经形态触觉传感器的触觉扫描仪并初步实现了类皮肤触觉特征的触觉信息采集。相关成果发表于《自然-通讯》。
“这一创新性的技术为实现机器触觉应用迈出了重要的第一步。”论文通讯作者王凯对《中国科学报》表示,其研究通过开发一种仿生神经形态触觉传感器,成功地模拟了生物体的触觉感知过程,为在虚拟环境中的“产生”真实触觉体验奠定了基础。
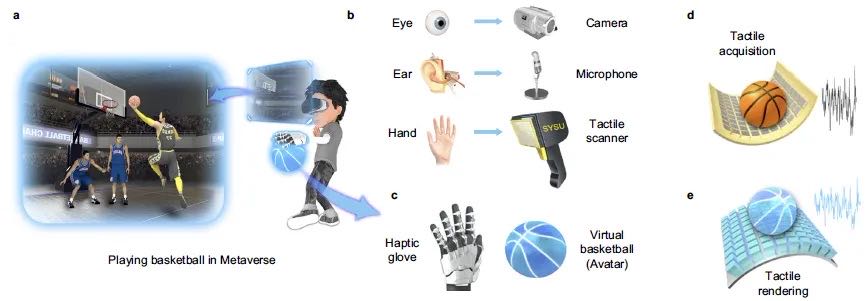 元宇宙中的“打篮球”游戏、触觉手套和基于触觉扫描仪的触觉信息采集和触觉渲染。王凯供图
元宇宙中的“打篮球”游戏、触觉手套和基于触觉扫描仪的触觉信息采集和触觉渲染。王凯供图
?
随着元宇宙概念的兴起,机器触觉正在成为未来沉浸式体验中不可或缺的关键技术之一。相较于机器视觉和机器听觉的成熟发展,机器触觉仍处于早期起步阶段,其所需的触觉感知设备、计算和渲染工具以及与之相对应的算法和软件十分匮乏。
为此,王凯团队联合中山大学计算机学院教授李文军和中国科学院微电子研究所副研究员李伟伟,研制出一种基于神经形态触觉传感器的扫描设备。他们利用柔性压电塑料和薄膜晶体管电路,模仿生物机械感受器和神经突触的功能,完成了机械刺激到类神经脉冲电信号的转换。
“这种神经形态触觉传感器的设计,不仅可以捕捉并识别不同材质表面的触觉信息,还可以通过人工神经网络实现了高准确度的表面分类识别,接近人类的触觉能力。”论文第一作者、中山大学电子与信息工程学院李惠敏博士表示,该研究利用制备的10×10神经形态触觉传感器阵列捕捉5种不同类型材质表面纹理的神经形态触觉信息。
“我们将这些触觉信息编码产生驱动执行器表面的触觉渲染信息,尝试再现皮肤在虚拟空间重现材质表面‘真实’的触觉。”李惠敏表示,不同类型材质的神经形态触觉信号频谱存在不同的特征峰,其采用人工神经网络计算的识别率高达93%,表明神经形态触觉传感器阵列可采集高质量材质表面特征信息。
“作为迈向机器触觉广泛应用的第一步,高保真和高质量数据采集技术至关重要。”王凯表示,其提出的非线性电路模型与脉冲编码电路,成功仿生了生物神经系统的触觉处理机制,这使得传感器在信息处理上更贴近人类的触觉感知方式。“未来,这一技术可能在虚拟现实、机器人和医疗健康等领域找到潜在应用,为用户带来更为逼真的触觉体验。”
据介绍,该神经形态触觉传感器,凭借其低成本、低功耗、易于集成和制备等特点,为实现大规模神经形态人工触觉感知系统奠定了坚实的理论和实验基础。
相关论文信息:https://doi.org/10.1038/s41467-024-51674-2
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。